
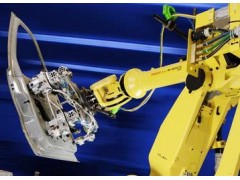





装配机器人的大量作业是轴与孔的装配,为了在轴与孔存在误差的情况下进行装配, 装配机器人应使机器人具有柔顺性。主动柔顺性是根据传感器反馈的信息而从动柔顺心则利用不带动力的机构来控制手爪的运动以补偿其位置误差。装配机器人主要用于各种电器制造(包括家用电器,如电视机、录音机、洗衣机、电冰箱、吸尘器)、小型电机、汽车及其部件、计算机、玩具、机电产品及其组件的装配等方面。
装配是产品生产的后续工序,在制造业中占有重要地位,在人力、物力、财力消耗中占有很大比例、作为一项新兴的工业技术,机器人装配应运而生。在机器人应用各领域中只占很小的份额。究其原因,一方面、是由于装配操作本身比焊接、喷涂、搬运等复杂,另一方面机器人装配技术目前还存在一些亟待解决的问题。如:对装配环境要求高,装配效率低,缺乏感知与自适应的控制能力,难以完成变动环境中的复杂装配,对于机器人的精度要求较高,否则经常出现装不上或卡死现象。尽管存在上述问题,但由于装配所具有的重要意义,装配领域将是未来机器人技术发展的焦点之一。其重要性在机器人应用中将跃居第一位。






